El objetivo del proyecto de investigacion y desarollo que planteamos es proveer de funcionalidades complementarias al uso de un andador mediante la implementacion de distintos tipos de sensores y actuadores controlados por un microcontrolador. El proyecto consta de dos etapas generales: prototipado utilizando las placas de desarollo Arduino e implementacion utilizando microcontroladores. En la primer […]
ANDADOR – CODE v2.0
// Adafruit NeoPixel – Version: Latest #include <Adafruit_NeoPixel.h> #define trig1Pin 2 #define trig2Pin 4 #define echo1Pin 3 #define echo2Pin 5 #define PIN 14 #define LED_COUNT 3 Adafruit_NeoPixel leds = Adafruit_NeoPixel(LED_COUNT, PIN, NEO_GRB + NEO_KHZ800); void setup() { Serial.begin (9600); pinMode(trig1Pin, OUTPUT); pinMode(trig2Pin, OUTPUT); pinMode(echo1Pin, INPUT); pinMode(echo2Pin, INPUT); leds.begin(); } void loop() { long distance1, distance2, […]
ANDADOR – Code v1.0
// Versión 1.0 – 20170828 #include <Adafruit_NeoPixel.h> #define trig1Pin 2 #define trig2Pin 4 #define echo1Pin 3 #define echo2Pin 5 #define PIN 14 #define LED_COUNT 3 Adafruit_NeoPixel leds = Adafruit_NeoPixel(LED_COUNT, PIN, NEO_GRB + NEO_KHZ800); void setup() { //Serial.begin (9600); pinMode(trig1Pin, OUTPUT); pinMode(trig2Pin, OUTPUT); pinMode(echo1Pin, INPUT); pinMode(echo2Pin, INPUT); leds.begin(); } void loop() { long distance1, distance2, color1, […]
ANDADOR – Andador con Detección de Obstáculos por Ultrasonido
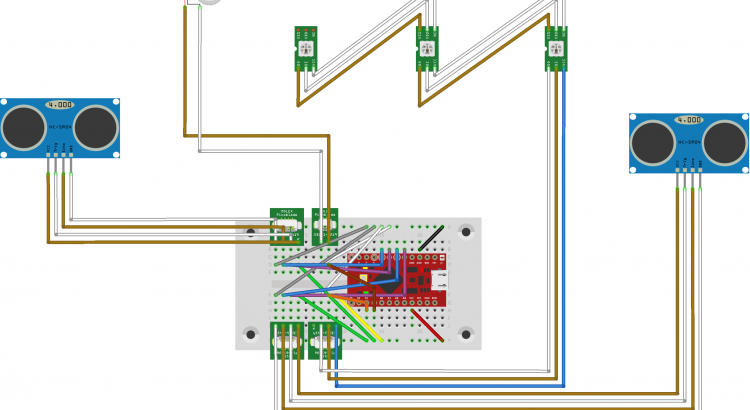
Log completo de desarrollo del Prototipo Andador con detección de obstáculos
