Inmunobio se trata de un proyecto interdisciplinario entre CIDI, CESyMA y de la Escuela de Ciencia y Tecnología (ECyT) de la Universidad Nacional de San Martín (UNSAM)
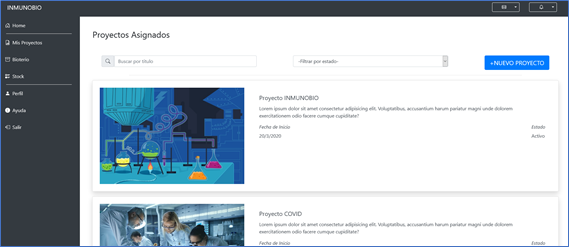
Entre CIDI, CESyMA y estudiantes de la Escuela de Ciencia y Tecnología (ECyT) de la Universidad Nacional de San Martín (UNSAM) se realiza la implementación de un sistema informático para resolver las necesidades del laboratorio ubicado en el INTI.
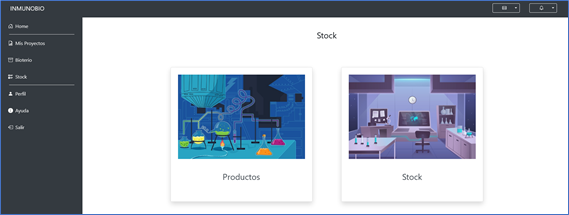
El objetivo es amplio: abarca desde el control de stock y la administración de fondos por proyecto de investigación y experimentación, hasta los ejemplares ubicados en los bioterios.
El grupo interdisciplinario continúa el trabajo con un gran esfuerzo, superado ya las partes de entrenamiento y formación a las diferentes tecnologías, documentación de arquitectura y diseño del sistema.
Tecnologías aplicadas
Integrantes
CESyMA
CIDI
Dra Vanesa Sanchez, Dr Ignacio Fenoy
Responsables: Director Dr. Javier Guevara, Dra. María Claudia Abeledo
Líder de proyecto:
Nohely Gonzalez
Grupo colaborador: Gabriel Jotallan, Emmanuel Alcaraz, Nayla Zarate, Julieta Romero
El 4 de octubre de 2019 fue el encuentro de jornada abierta del barrio ejercito de los andes con el equipo del centro de investigación y desarrollo en informantica (CIDI) . El estudiante Mateo Sauton de la Escuela de Ciencia y Tecnología de la UNSAM encabeza un taller donde se hizo una demostración robot de sumo autónomo.
El objetivo fue acercar la robótica y la programación a los estudiantes de la Técnica Nº4 .
Explicación
Las competencia robots de sumo compitieron por pares en un dohyo (tablero circular). El robot ganador será el que logre sacar a su contrincante fuera del dohyo .
Descripción del robot monísimo Un robot mini sumo debe tener un área limitada de 10 cm x 10 cm, sin restricciones en la altura del mismo y no debe superar un peso de 500 g (Mont, et al., 2017). Por lo tanto, el diseño mecánico y el algoritmo de control toman una gran importancia en el propósito de garantizar un buen desempeño del robot y que cumpla con las especificaciones mencionadas. Las competencias con robots mini sumo consisten en que dos robots luchan por sacar al oponente y evitar ser ex . Los hardware y el software para fabricarlo y programarlo es libre y abierto.
Robot-sumo se divide en clases, se lucha en arenas progresivamente más pequeñas: De peso pesado. Estándar en el National Robotics Challenge . Los robots pueden pesar hasta 56,8 kg y caber en un cubo de 61 cm.
Ligero. También estándar en el National Robotics Challenge . Los robots pueden pesar hasta 22,7 kg y caber en un cubo de 61 cm.
Los robots de clase estándar (a veces llamados Mega-sumo) pueden pesar hasta 3 kg y caber dentro de una caja de 20 cm por 20 cm, cualquier altura.
Mini-sumo. Hasta 500 g de masa, 10 cm por 10 cm, cualquier altura.
Micro-sumo. Hasta 100 g de masa, debe caber en un cubo de 5 cm.
Video de competencias
También hay robots de sumo Lego Mindstorms NXT, en los que compiten los robots NXT. Los robots generalmente tienen que caber en un cubo de un pie. Las clases se dividen además en robots autónomos y controlados a distancia. Además, puede haber una categoría vinculada (varía). Los robots de sumo se construyen desde cero, a partir de kits o componentes de Lego , en particular los sets de Lego Mindstorms .
En este proyecto, el CESyMA y el CIDI, se han unido en un proyecto común.
El objetivo del proyecto BIOSENS es proveer al laboratorio QUOMSET de un sistema automático de alerta ante la falta de suministro eléctrico al conjunto de refrigeradores del recinto.
Para poder desarrollar las tareas normales, el laboratorio cuenta con una serie de heladeras o refrigeradores que preservan material de experimentación e investigación.
El problema principal es el tiempo que los
refrigeradores quedan sin energía y la consiguiente pérdida de frío para
preservar el material que contienen. En estas épocas de pandemia, el personal
del laboratorio cumple horario restringido y en general, concurren mucho menos
al recinto de trabajo.
Por esta razón, el equipo del CIDI de la UNSAM está desarrollando el proyecto BIOSENS, cuyo responsables son Fabio Bruschetti y Pedro Iriso. Este proyecto proveerá de un alerta remoto, autónomo, autosuficiente en energía y configurable para que envíe mensajes SMS a dispositivos móviles indicando una serie de anomalías detectadas; entre ellas, falta de suministro eléctrico del proveedor, corte de suministro en llave térmica, falta de suministro eléctrico de grupos electrógenos, entre otros.
El suministro eléctrico para estos equipos es mandatorio con lo cual, ante un corte o falla en el sistema eléctrico, el personal del laboratorio dispone de equipos electrógenos que manualmente pone en marcha. Esta maniobra solo podrá realizarse si alguien del personal del laboratorio se encuentra físicamente en él cuando eso ocurre o cuando reciben un mensaje o llamado telefónico cuando se encuentran fuera del horario de trabajo.
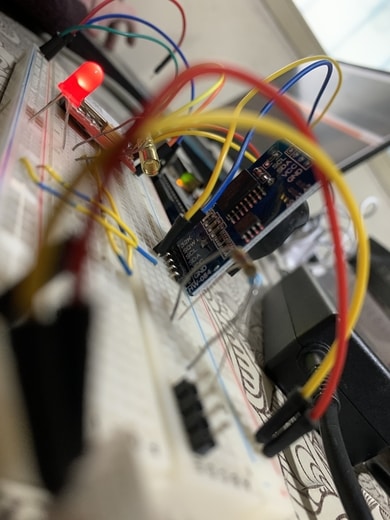
Se desarrollará un dispositivo basado en tecnología Arduino contando con módulos de tensión regulada, un módulo de envío de mensajes SMS con chip recargable, sensores de tensión eléctrica alterna, un módulo de reloj en tiempo real, todo esto alimentado por una fuente de corriente continua ininterrumpida diseñada por el equipo del CIDI. El software que se desarrollará contemplará la inclusión de varios sensores, la programación del texto de los mensajes para cada alerta, la elección del número de teléfono para el envío de los mensajes y la posibilidad de ser monitoreado a través de un acceso VPN a la red del laboratorio. Esto último podrá realizarse en la medida de que se disponga del servicio de VPN.
La investigación llevada a cabo terminó con el relevamiento de campo en el laboratorio y con su responsable para la identificación de requerimientos y especificaciones esperadas. Se ha desarrollado el esquema del dispositivo a integrar y actualmente está en la fase de adquisición de componentes y prueba unitaria de los módulos. Una vez finalizado el prototipo completo del dispositivo junto con el software completo, se realizarán las primeras pruebas de campo en el laboratorio para identificar posibles ajustes para luego finalizar el dispositivo colocándolo dentro de un gabinete seguro y protegido. La fase final será la instalación y prueba integral de funcionamiento con el usuario y la provisión de la documentación correspondiente.
Integrantes
CESyMA
CIDI
Dra Vanesa Sanchez, Dr Ignacio Fenoy
Líderes de proyecto: Fabio Bruschetti, Pedro Iriso
Grupo responsable: Pablo Bilocopetiuc, Nicolas Villamonte, Tomas Lovera, María Claudia Abeledo.